

Overview
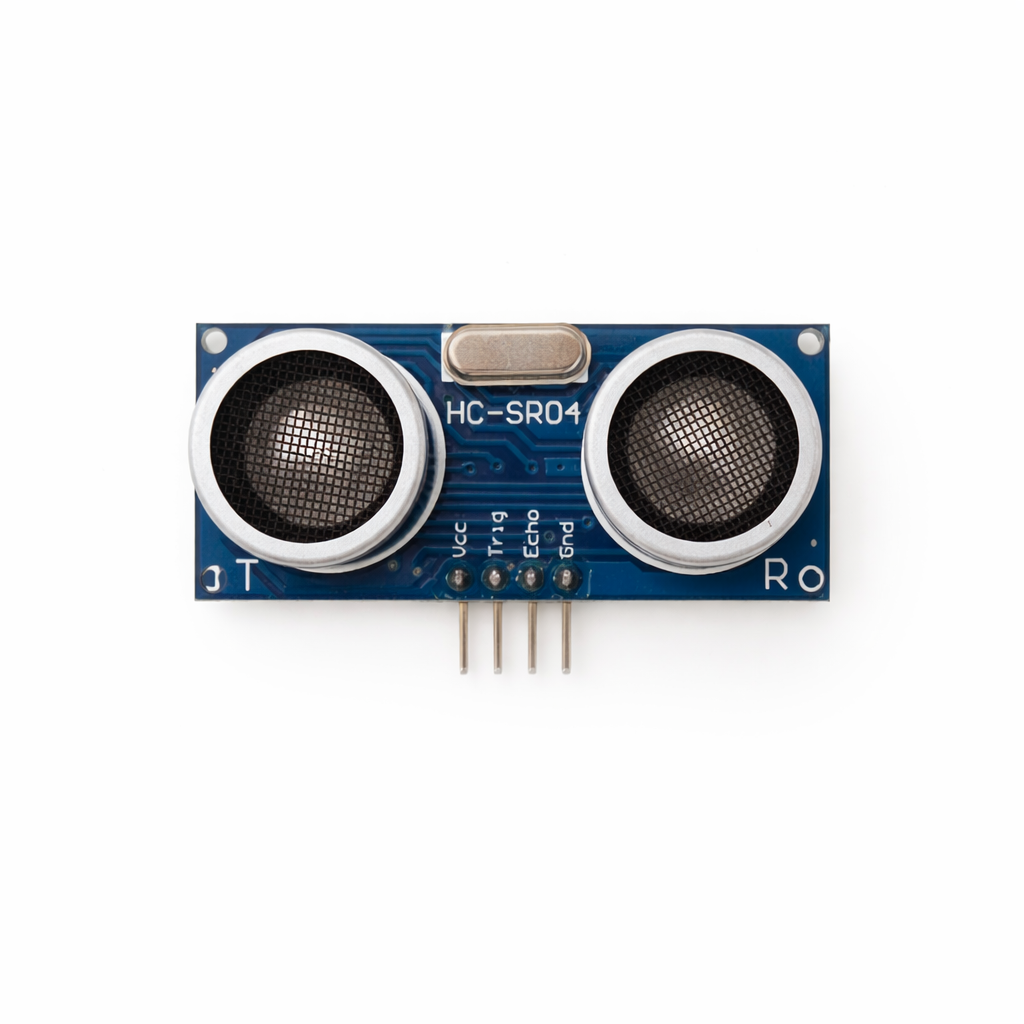
Ultrasonic waves are a powerful and accurate sensing method, making them suitable for object detection in robotics. I built a Sense and Detect Rover using an HC-SR04 ultrasonic sensor, which emits ultrasonic sound waves at approximately 40 kHz, a frequency beyond human hearing. When these waves encounter an obstacle, they reflect back to the sensor, enabling distance measurement through time-of-flight.
Learnings
Through this project, I am learning how reflected ultrasonic signals can be converted into electrical signals and processed to calculate distance. By measuring the time delay between transmission and reception, the rover determines the proximity of nearby objects and makes real-time navigation decisions, such as avoiding obstacles while moving through its environment.
Design Process
- Ultrasonic distance sensing for obstacle detection
- Microcontroller-based control loop
- Reactive path planning logic
Main Components
- Arduino Board
- Motor Shield
- HC-SR04 Ultrasonic Sensor
- SG90 Micro Servo
Results
In Progress.